
Like all robots, drones generate massive amounts of multimodal log data during every mission. This data is essential for diagnosing issues and monitoring system performance, but it's complex and time-consuming to review. At most drone companies, engineers spend hours analyzing it with custom scripts and visualization tools just to reconstruct exactly what happened after something goes wrong.
This manual process doesn’t scale as fleets grow from dozens to hundreds or thousands of drones – and it often means teams are stuck reacting to failures instead of seeing the early warning signs that could have prevented them.
At Amazon Robotics, we saw firsthand that the only way to scale robotics operations is through automation. Manual log review simply can't keep up as fleets grow. To operate at scale, log review must be automated – and today, AI can take on much of the heavy lifting. The key question is whether AI can actually cut through the noise and surface the issues and events that matter.
We think AI can accelerate log review and analysis in three major ways:
At Roboto, we’re actively building across all of these areas. In this post, we’ll focus on intelligent summarization, and show how our new AI Summary feature turns complex log data into clear, actionable insights.
This builds on our previous blog post: Automate Your Robotics Data Analysis with Actions, where we demonstrated automated issue detection using actions and triggers. While automated detection solves the discovery problem, complex robotics systems can still generate hundreds of flagged events requiring expert analysis.
AI Summaries take this to the next level: transforming these events into short, human-readable reports that reduce both the time and technical expertise required for analysis.
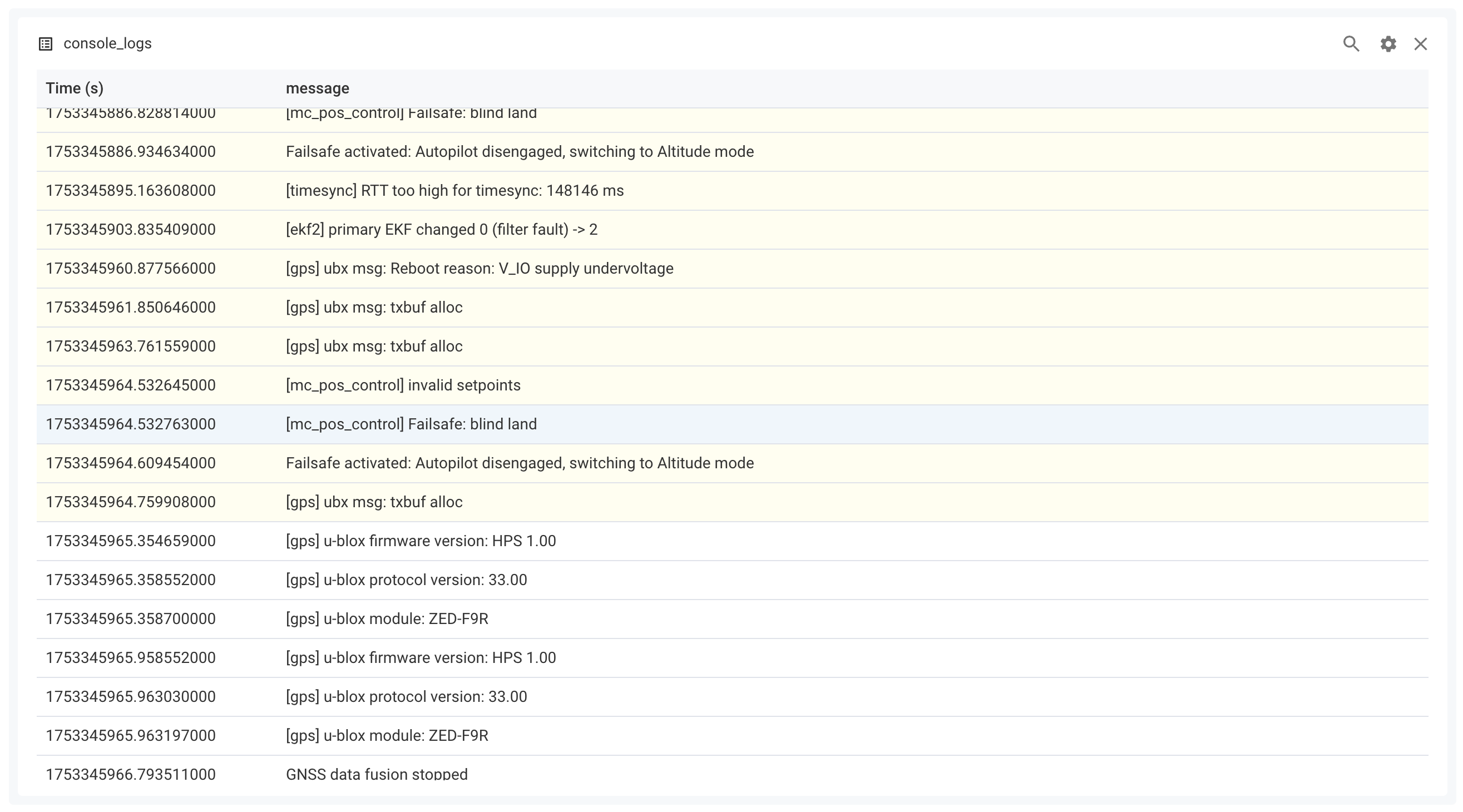
Let’s look at a concrete example using logs from the open-source PX4 Autopilot, which powers many drones worldwide.
A typical PX4 ULog file contains at least 2,000 separate time-series signals in over 100 topics, making manual investigation extremely challenging.
When Roboto ingests PX4 ULog files, we run a series of automated checks on this data that focus on the same key indicators that experienced drone engineers know to look for.
These checks include:
If any issues are detected by these checks, corresponding events get created in Roboto with rich metadata. While these checks are fairly standardized for PX4 log analysis, users can also define and create their own custom events, whether manually or automatically with actions.
A language model then analyzes all of these events and crafts a coherent AI Summary that explains what needs attention and why it matters.
To ensure accuracy, we ground every summary in verifiable platform data. Users can click on any surfaced events to visualize the underlying data, so they can verify findings and dive deeper if needed.
Let's examine a recent crashed flight that was uploaded to the PX4 community forum.
Here's the operator's description:
I took my [...] drone for a flight yesterday and took off in position mode. All started well and I initially tested all the controls when all of a sudden the drone just shot up into the air. My guess was that the GPS altitude estimation was just extremely unreliable. The drone also did not really respond to my inputs anymore.
Ultimately the drone crashed, which can be seen at the end when the position is just drifting away.
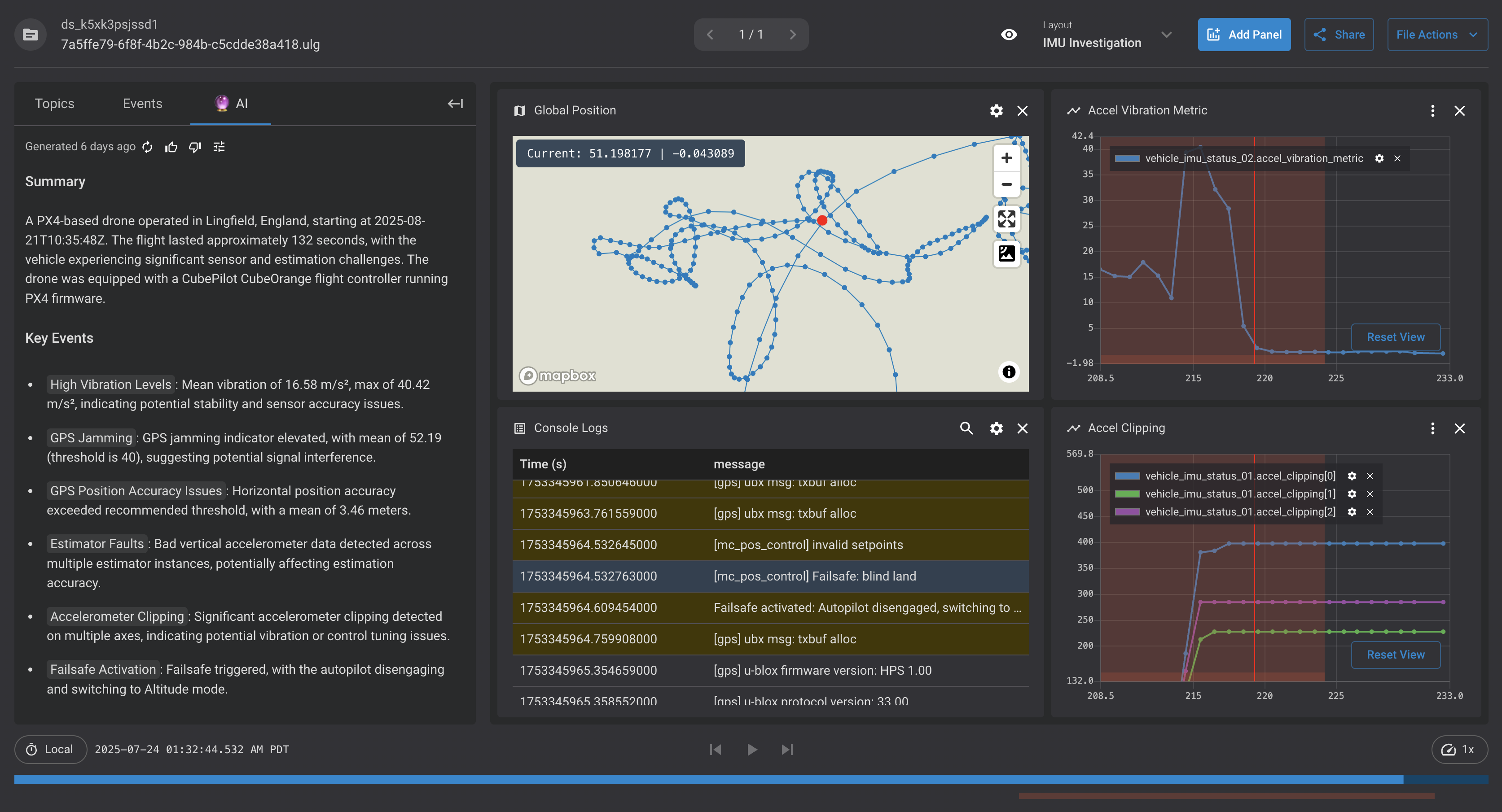
We took the log file and uploaded it to Roboto for analysis. Let’s look at the interactive AI Summary that was generated for the flight:
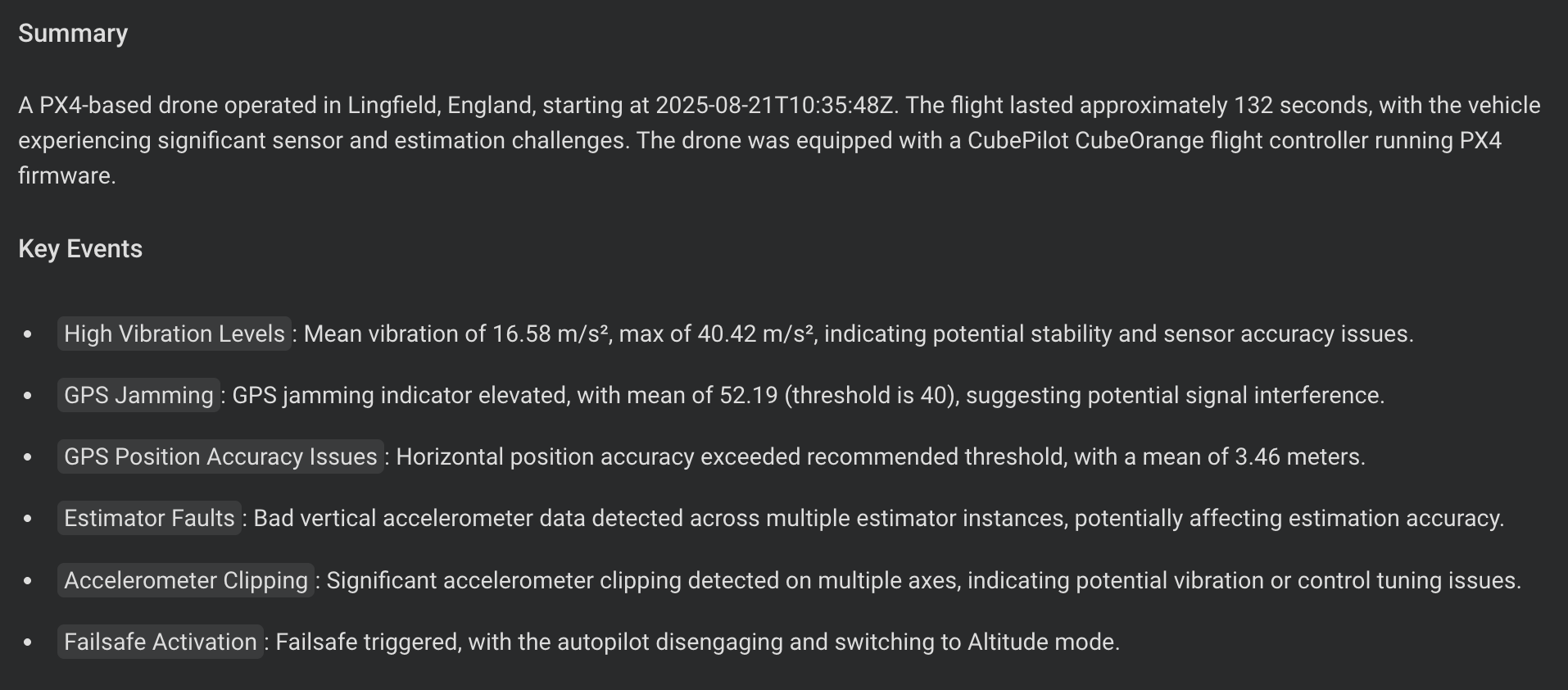
The AI Summary suggests a plausible sequence of cascading failures that may have led to the crash:
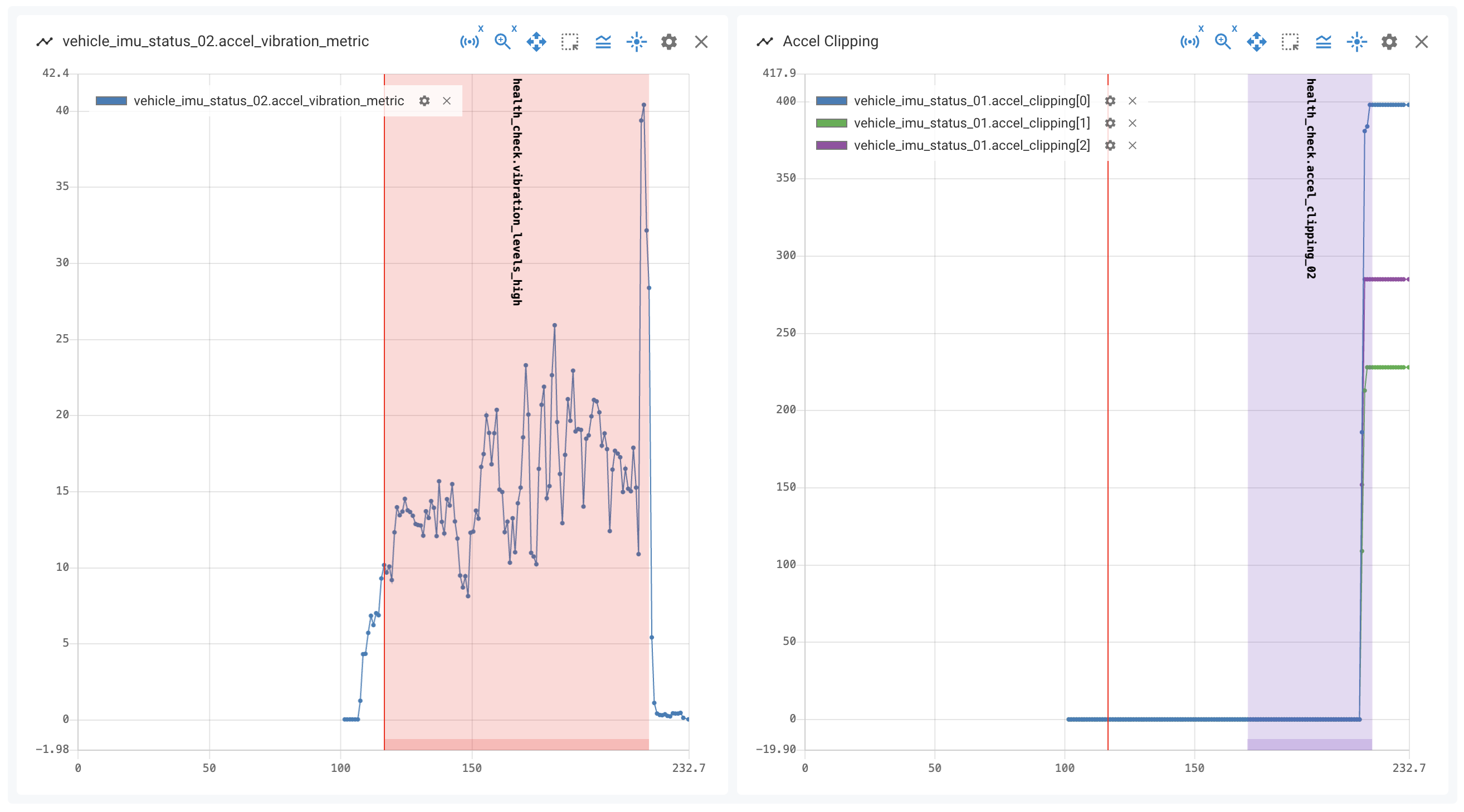
(1) Strong vibrations were detected, with mean levels of 16.58 m/s² and peaks up to 40.42 m/s². Accelerometer clipping was also observed, indicating the sensor’s measurement range was exceeded. Together, these findings suggest that vibrations reached levels beyond what the IMU could physically capture.
(2) This vibration appears to have compromised the vertical accelerometer measurements, as evidenced by the Estimator Fault flag for "bad vertical accelerometer data." When the flight computer loses confidence in its vertical acceleration readings, altitude control can become unreliable, potentially explaining the pilot's report of the drone "shooting up into the air."

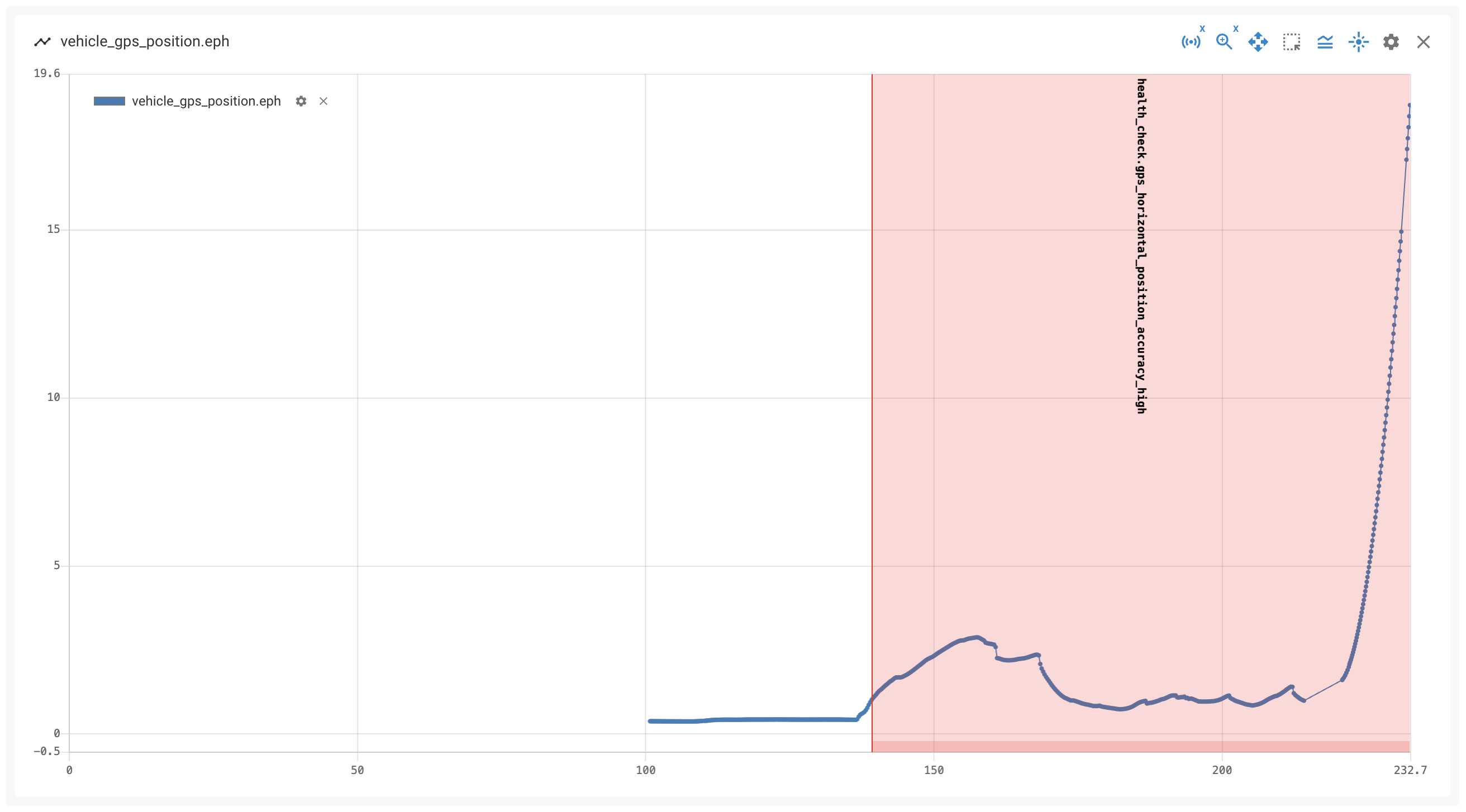
(3) The situation may have been worsened by degraded GPS signals, with high interference levels (GPS Jamming indicator of 52.19, above threshold) and reduced position accuracy (3.46 m). Such interference could originate from onboard electronics or external jamming. Combined with unreliable IMU data, this would have left the drone without dependable altitude and position references.
(4) This combination of vibration and sensor issues likely triggered the Failsafe Activation, where the autopilot recognized the dangerous situation and switched to Altitude mode as a last resort. However, by this point, the drone had already lost much of the sensor reliability needed for stable flight, contributing to the eventual crash.
While identifying the exact root cause of the vibration would require further investigation, the AI Summary quickly surfaced the key issues and enabled a preliminary analysis within minutes rather than hours.
Our analysis identifying excessive vibration as the likely culprit for the incident aligns with the community's expert assessment. Julian Oes from the PX4 Dev Team also identified excessive vibration as the primary driver of flight instability. Upon further investigation, the root cause was traced to improper autopilot mounting and loose cables that exacerbated the vibration issues. As the operator later reported:
I indeed mounted the flight controller quite poorly and also did not secure all the cables properly enough to prevent vibrations.
I now used double sided foam pads to mount all electronic components and zip tied all cables. I hope this will resolve the issues.
In many robotics teams, analyzing robot logs is still a major bottleneck: engineers have to download files and spend hours with graphical tools to find root causes. As a result, most operational data goes unreviewed, meaning early warning signs and opportunities for improvement are routinely missed.
In this post, we showed how AI Summaries can change that. Our PX4 drone crash analysis revealed how AI can surface expert-level insights in minutes, not hours, and in language accessible to any operator.
This is only the beginning. Our goal is proactive AI that spots issues and recommends fixes automatically. That future depends on a true data flywheel: continuous ingestion, automated analysis, and learning that transforms every robot log into intelligence for a smarter, more reliable fleet.
Sign up to Roboto to try it out with your own PX4 logs (docs) - we'd love your feedback!
